Elaboration d’un graphique représentant les vecteurs position, vitesse et accélération d’un tir sans frottement à partir de son horaire.
Grâce aux équations paramétriques, qui découlent de l’horaire, il est possible de déterminer la position, vitesse, accélération, et la trajectoire d’un tir parabolique sans frottement.
Voici l’horaire d’un tir parabolique sans frottement :
r = r0 + v0*t + 1/2*g*t²
[avec r = (x0 ; y0), vx0 = v0*cos(α), vy0 = v0*sin(α), g = (gx0 ; gy0)]
Pour avoir les équations paramétriques, il faut décomposer ce dernier :
x(t) = x0 + v0*cos(α)*t + 1/2*gx0*t²
y(t) = y0 + v0*sin(α)*t + 1/2*gy0*t²
[avec x0 = 0, y0 = 0, v0 = 20 m/s, gy0 = -9.81 m/s², tinitial = 0 s, tfinal = 3.5 s, Δt = 0.5, α = 60°]
On peut alléger nos équations en enlevant x0 et y0, puisqu’ils valent 0.
On peut notamment simplifier 1/2*gx0*t² en considérant qu’il soit égal à 0, car on estime que le plan sur lequel nous nous trouvons est horizontal.
gx0 sera donc nul.

On a alors :
x(t) = v0*cos(α)*t
y(t) = v0*sin(α)*t + 1/2*gy0*t²
On obtient Vx en faisant la dérivée de x(t) :
– x(t) = v0*cos(α)*t
– vx = v0*cos(α) = 10
On obtient Vy en faisant la dérivée de y(t) :
– y(t) = v0*sin(α)*t + 1/2*gy0*t²
– vy = v0*sin(α) + 2*(1/2*gy0*t)
– vy = v0*sin(α) + gy0*t
On obtient ax en faisant la dérivée de Vx :
– vx = v0*cos(α)
– ax = 0
On obtient ay en faisant la dérivée de Vy :
– vy = v0*sin(α) + gy0*t
– ay = gy0= -9.81
Faisons un tableau de valeurs :
| t | x | y | vx | vy | ax | ay |
|---|---|---|---|---|---|---|
| 0 | 0 | 0 | 10 | 17.32 | 0 | -9.81 |
| 0.5 | 5 | 7.434 | 10 | 12.42 | 0 | -9.81 |
| 1 | 10 | 12.42 | 10 | 7.511 | 0 | -9.81 |
| 1.5 | 15 | 14.94 | 10</span | 2.606 | 0 | -9.81 |
| 2 | 20 | 15.02 | 10 | -2.299 | 0 | -9.81 |
| 2.5 | 25 | 12.65 | 10 | -7.204 | 0 | -9.81 |
| 3 | 30 | 7.817 | 10 | -12.11 | 0 | -9.81 |
| 3.5 | 35 | 0.5355 | 10 | -17.01 | 0 | -9.81 |
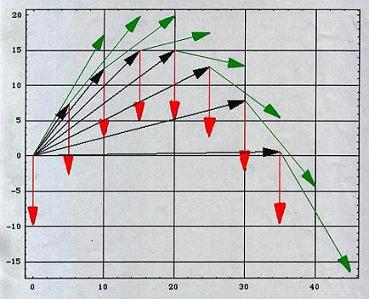
Nous avons dorénavant les valeurs nécessaires pour dessiner les différents vecteurs (position, vitesse, accélération) à un temps t défini.
Voilà à quoi cela ressemble :