Les sites des iLES proposent des ressources en mathématiques et en sciences. Ils scrutent l’actualité statistique et culturelle. Ils utilisent des CDF et des widgets. Ils offrent de l’interaction entre apprenants.
Puissance, section apparente et coefficient de forme
Le modèle permet de trouver la vitesse maximale d’un véhicule dont la puissance, la section apparente et le coefficient de forme sont connus.
Article mis en ligne le 12 février 2006
dernière modification le 8 mai 2007
Les constructeurs d’automobiles fournissent très souvent les caractéristiques techniques suivantes : puissance et couple du moteur, dimensions, coefficient de forme et masse du véhicule. Ils indiquent aussi les performances du véhicule : temps pour accélérer de 0 à 100 km/h, pour franchir 400 m et 1000 m départ arrêté et vitesse maximale. Ces performances peuvent être déduites des caractéristiques techniques.
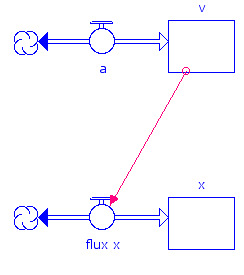
Le modèle permettant d’obtenir la vitesse d’un véhicule et sa position lorsqu’on sait exprimer son accélération (qui n’est pas constante) en fonction du temps est très simple :
Modèle permettant d’obtenir la vitesse et la position à partir de l’accélération
Pour un mouvement à une dimension, la vitesse s’obtient en intégrant l’accélération et la position en intégrant la vitesse.
Modèle permettant d’obtenir la vitesse et la position à partir de l’accélération. Pour un mouvement à une dimension, la vitesse s’obtient en intégrant l’accélération et la position en intégrant la vitesse.
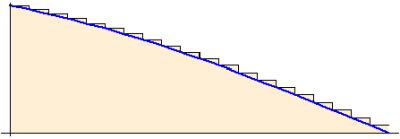
La vitesse s’obtient en « intégrant » l’accélération. Cette opération est réalisée par le flux a connecté au réservoir v. STELLA considère que la valeur de l’accélération qui se trouve dans le flux ne se modifie pas durant un intervalle dt. Il multiplie cette valeur par dt et place le résultat dans le réservoir v. Il met à jour la valeur de l’accélération, puis répète le processus jusqu’au temps final. Cela revient à approximer la surface qui se trouve sous la courbe donnant l’accélération en fonction du temps par celle de petits rectangles de hauteurs constantes de base dt :
Intégrer revient à trouver l’aire comprise entre la fonction et l’axe Ox.
Pour trouver une approximation de l’aire comprise entre la ligne bleue et l’axe horizontal, on peut remplacer la ligne par un escalier, calculer la surface de chaque petit rectangle et additionner toutes ces surfaces.
Intégrer revient à trouver l’aire comprise entre la fonction et l’axe Ox. Pour trouver une approximation de l’aire comprise entre la ligne bleue et l’axe horizontal, on peut remplacer la ligne par un escalier, calculer la surface de chaque petit rectangle et additionner toutes ces surfaces.
En plaçant le résultat de cette première intégration dans un flux, et en répétant le processus on réalise une deuxième intégration et on obtient la position x du véhicule en fonction du temps.
Relation fondamentale de la dynamique
C’est la relation fondamentale de la dynamique :
où représente la somme des forces qui agissent sur le mobile de masse m qui permet d’exprimer son accélération . Dans le cas d’un véhicule roulant sur une route horizontale, cette somme des forces résulte de la force de traction et de la force de frottement . La puissance permet d’exprimer la force de traction. La force de frottement due à l’air dépend de la vitesse du véhicule :
Modèle permettant d’obtenir les horaires du véhicule
La relation fondamentale de la dynamique permet d’exprimer l’accélération d’un mobile de masse m lorsqu’on connaît la résultante F des forces qui s’exercent sur lui.
Modèle permettant d’obtenir les horaires du véhicule : la relation fondamentale de la dynamique permet d’exprimer l’accélération d’un mobile de masse m lorsqu’on connaît la résultante F des forces qui s’exercent sur lui.
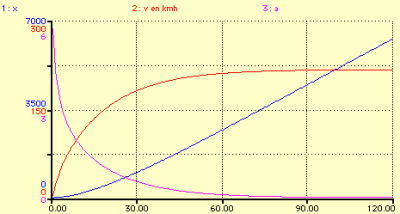
Le modèle permet d’obtenir les horaires du véhicule :
Horaires du véhicule
Position x (en m), vitesse (en km/h) et accélération a (en m/s2) en fonction du temps (en s).
Horaires du véhicule : position x (en m), vitesse (en km/h) et accélération a (en m/s2) en fonction du temps (en s).