Les sites des iLES proposent des ressources en mathématiques et en sciences. Ils scrutent l’actualité statistique et culturelle. Ils utilisent des CDF et des widgets. Ils offrent de l’interaction entre apprenants.
Une masse accrochée à un ressort constitue un oscillateur harmonique. Dans ce système, la masse est soumise à deux forces : son poids et la force de rappel due au ressort. Par un choix judicieux de l’origine de l’axe qui repère la position de la masse, il est possible de « neutraliser » la contribution du poids. L’examen du système peut alors se faire en considérant uniquement la force de rappel exercée sur la masse par le ressort lorsqu’elle s’écarte de sa position d’équilibre.
Considérons un ressort accroché au plafond. Suspendons une masse à l’extrémité libre du ressort et lâchons-la. Nous avons un oscillateur harmonique.
Oscillateur harmonique
Animation réalisée avec Mathematica et tirée de VisualDSolve de Stan Wagon.
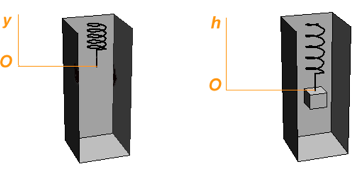
Repérons la position de la masse depuis deux systèmes de référence.
l’origine 0 du premier système coïncide avec l’extrémité libre du ressort « à vide » et l’axe Oy est vertical orienté vers le haut.
l’origine 0 de second système coïncide avec la position d’équilibre de la masse accrochée au ressort et l’axe Oh est vertical orienté vers le haut.
Repérage de la masse depuis deux systèmes de référence
À gauche, l’origine de l’axe coïncide avec l’extrémité libre du ressort. À droite, l’origine de l’axe coïncide avec la position d’équilibre de la masse.
Accélération de la masse
Dans le premier système, si on accroche la masse au ressort, son accélération vaudra -g-ky/m
Dans le deuxième, son accélération est donnée par -kh/m.
En faisant coïncider l’origine de l’axe qui repère la masse avec sa position d’équilibre, on annule les forces qui agissent sur elle lorsqu’elle se trouve dans cette position (le poids est compensé par la force de rappel). La force exercée sur la masse pour n’importe quelle autre position ne dépend alors plus que de l’écart par rapport à cette position d’équilibre.
Premier modèle
L’origine de l’axe qui repère la position de la masse oscillante coïncide avec l’extrémité libre du ressort.
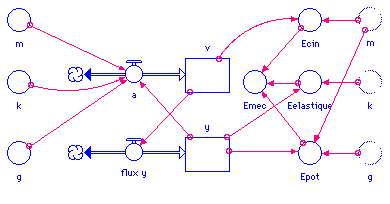
Modèle simulant le mouvement d’un oscillateur harmonique
Équations du modèle
INIT v = 0
a = -g-k*y/m
INIT y = 0
flux_y = v
Ecin = m*v^2/2
Eelastique = k*y^2/2
Emec = Ecin+Eelastique+Epot
Epot = m*g*y
g = 9.8
k = 100
m = 0.5
Résultats
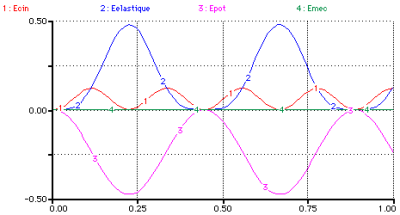
Énergies mises en jeu lors de l’oscillation de la masse
La somme de l’énergie cinétique, élastique et potentielle est constante et correspond à l’énergie mécanique du système qui vaut ici 0 J.
Énergies mises en jeu lors de l’oscillation de la masse : la somme de l’énergie cinétique, élastique et potentielle est constante et correspond à l’énergie mécanique du système
Deuxième modèle
L’origine de l’axe qui repère la position de la masse oscillante coïncide avec sa position d’équilibre.
Énergies mises en jeu lors de l’oscillation de la masse
La somme de l’énergie cinétique de la masse et élastique du ressort est constante et est égale à l’énergie mécanique du système qui diffère de celle obtenue dans le premier modèle.
Équations du modèle
INIT v = 0
a = -k*h/m
INIT h = 9.81*m/k
flux_v = v
Ecin = m*v^2/2
Eelastique = k*h^2/2
Emec = Ecin+Eelastique
k = 100
m = 0.5
Résultats
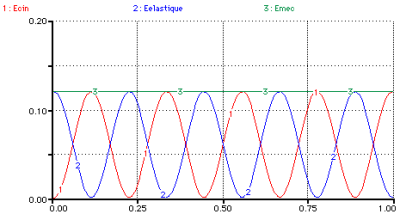
Énergies mises en jeu lors de l’oscillation de la masse
La somme de l’énergie cinétique de la masse et élastique du ressort est constante et est égale à l’énergie mécanique du système qui diffère de celle obtenue dans le premier modèle.
Énergies mises en jeu lors de l’oscillation de la masse : la somme de l’énergie cinétique de la masse et élastique du ressort est constante et est égale à l’énergie mécanique du système qui diffère de celle obtenue dans le premier modèle.
Pour les deux modèles
Run Spec:
From: 0
To: 1
DT: 0.01
Integration Method: Runge-Kutta 4.
Conclusion
Les deux modèles permettent de vérifier que l’énergie mécanique du système est conservée. Le deuxième modèle, en faisant coïncider l’origine de l’axe avec la position d’équilibre de la masse permet de « neutraliser » la contribution du poids et simplifie le problème. La seule force qui agit alors sur la masse est une force de rappel proportionnelle à l’écart par rapport à cette position d’équilibre.