Rapport de laboratoire sur les oscillations
par Laurent Chuat, Yannick Schlaeppi
Le mouvement périodique est à la base de tout l’édifice créé pour rendre compte de l’évolution temporelle d’un système. Dès lors, connaître la période d’un oscillateur permet de calculer des grandeurs affiliées telles que la raideur d’un ressort ou encore g, l’accélération terrestre pour un pendule, grâce aux liens qui unissent ces différentes variables.
But : Mettre en évidence les relations entre les différentes variables qui entrent en jeu avec un oscillateur harmonique ou un pendule.
Matériel :
- Un jeu de masses de 0.05 et 0.01 kg
- Un pendule
- Plusieurs ressorts aux constantes
 différentes
différentes - Un détecteur Vernier et le logiciel LabPro (optionnel)
- Un chronomètre
- Un double-mètre
1. Généralités
La période ![]() d’un oscillateur harmonique s’écrit sous la forme
d’un oscillateur harmonique s’écrit sous la forme ![]() avec
avec ![]() la masse de l’oscillateur et
la masse de l’oscillateur et ![]() la constante du ressort. Cette constante
la constante du ressort. Cette constante ![]() peut s’obtenir avec la formule
peut s’obtenir avec la formule ![]() avec
avec ![]() la force appliquée au ressort et
la force appliquée au ressort et ![]() l’écartement par rapport à la position d’origine du ressort sans masse.
l’écartement par rapport à la position d’origine du ressort sans masse.
Dans le cas d’un pendule, la formule est similaire et s’écrit sous la forme ![]() avec
avec ![]() la longueur du pendule et
la longueur du pendule et ![]() l’accélération terrestre. Cette formule n’est par contre valable que pour de petites amplitudes.
l’accélération terrestre. Cette formule n’est par contre valable que pour de petites amplitudes.
2. Oscillateur harmonique
Nous avons à notre disposition 2 ressorts. Il est demandé de trouver expérimentalement leur constante ![]() . Grâce à LabPro et son détecteur, il devient relativement simple de calculer cette constante en accrochant différentes masses aux ressorts et en mesurant leur position d’équilibre.
. Grâce à LabPro et son détecteur, il devient relativement simple de calculer cette constante en accrochant différentes masses aux ressorts et en mesurant leur position d’équilibre.
Il est également possible de se passer du détecteur et de mesurer le tout à la main, mais avec les imprécisions manuelles qui en découlent alors.
Les valeurs obtenues sont les suivantes :
Ressort 1 :
| Position (m) | Force (N) |
|---|---|
| 0.896 | 0 |
| 0.859 | 0.589 |
| 0.828 | 1.079 |
| 0.808 | 1.570 |
| 0.767 | 2.060 |
Constante ![]() = 16.35 N/m
= 16.35 N/m
Ressort 2 :
| Position (m) | Force (N) |
|---|---|
| 0.853 | 0 |
| 0.715 | 0.589 |
| 0.576 | 1.079 |
| 0.440 | 1.570 |
Constante ![]() = 3.78 N/m
= 3.78 N/m
Vu que nous avons utilisé le détecteur et le programme LabPro, nous considérons ces mesures comme étant exactes et que l’incertitude dessus est nulle ou tout du moins négligeable.
Suivant cela, nous accrochons une masse à ces 2 ressorts et mesurons cette fois-ci, la période d’oscillation. Les résultats obtenus sont les suivants :
Pour le premier ressort , avec une masse de 0.11 kg ![]() 0.005 kg, le temps obtenu pour 20 oscillations est de 10.9 s, ce qui nous donne une période
0.005 kg, le temps obtenu pour 20 oscillations est de 10.9 s, ce qui nous donne une période ![]() de 0.55 s
de 0.55 s ![]() s.
s.
Pour le deuxième ressort, avec une masse de 0.06 kg ![]() 0.005 kg, le temps obtenu pour 20 oscillations est de 17.9 s, soit une période
0.005 kg, le temps obtenu pour 20 oscillations est de 17.9 s, soit une période ![]() de 0.85 s
de 0.85 s ![]() s.
s.
Puis, grâce à la formule ![]() , nous pouvons donc isoler
, nous pouvons donc isoler ![]() , ce qui nous donne
, ce qui nous donne ![]() soit :
soit :
– pour le premier ressort, une constante ![]() calculée de 14.62 N/m
calculée de 14.62 N/m ![]() 3.26 N/m.
3.26 N/m.
– pour le second ressort, une constante ![]() calculée de 3.28 N/m
calculée de 3.28 N/m ![]() 0.66 N/m
0.66 N/m
Nos résultats sont certes quelques peu éloignés mais gardent une assez bonne précision, principalement pour le second ressort et en tenant compte de l’incertitude. La différence peut s’expliquer par le fait que lors de l’expérience pratique, ce n’était pas seulement la masse qui oscillait, mais également le ressort qui n’oscillait pas parfaitement droit (verticalement) mais également sur les côtés.
Il était ensuite demandé de déterminer la masse ![]() , permettant de doubler la période
, permettant de doubler la période ![]() .
.
![]()
Nous remplaçons notre nouvelle masse ![]() par une inconnue
par une inconnue ![]() :
:
![]()
![]()
![]()
Nous remplaçons ici ![]() par
par ![]() ce qui donne :
ce qui donne :
![]()
et enfin :
![]()
Il faut donc une masse 4 fois plus grande pour doubler la période. Après vérification avec le second ressort et une masse de 0.24 kg, la période ![]() obtenue est de 1.59 s
obtenue est de 1.59 s ![]() , ce qui est très proche de la valeur théorique que nous devrions obtenir ( 1.70 s
, ce qui est très proche de la valeur théorique que nous devrions obtenir ( 1.70 s ![]() ).
).
3. Pendule
Il nous est demandé ensuite de calculer ![]() , l’accélération terrestre, à partir de la période
, l’accélération terrestre, à partir de la période ![]() et la longueur
et la longueur ![]() d’un pendule.
d’un pendule.
Nous prenons donc un pendule de longueur ![]() valant 0.658 m
valant 0.658 m ![]() . Sa période
. Sa période ![]() mesurée sur 10 oscillations est alors de 1.62 s
mesurée sur 10 oscillations est alors de 1.62 s ![]() .
.
Appliquons ensuite la formule ![]() et donc
et donc ![]() , ce qui nous donne un
, ce qui nous donne un ![]() valant
valant ![]() , valeur très proche du 9.81 théorique à Genève. La précision du résultat dépend grandement de celle des mesures.
, valeur très proche du 9.81 théorique à Genève. La précision du résultat dépend grandement de celle des mesures.
La question suivante nous demandait de vérifier que pour de petites amplitudes, la période ![]() était bien proportionnelle à
était bien proportionnelle à ![]() .
.
Nous avons trouvé les valeurs suivantes :
| Longueur (m) | Période (s) |
|---|---|
| 0.56 | 15/10 s = 1.5 s |
| 0.50 | 14.4/10 s = 1.44 s |
| 0.32 | 11.5/10 s = 1.15 s |
| 0.25 | 10.4/10 s = 1.04 s |
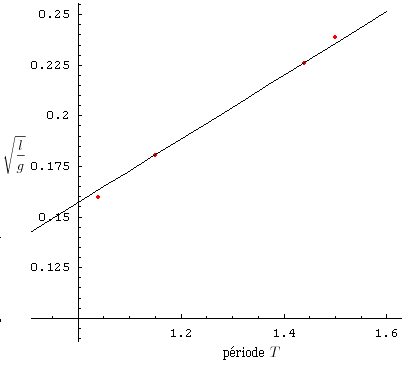
 en fonction de la période
en fonction de la période  en fonction de la période avec droite affine moyenne (attention, les axes ne sont pas orthonormés et ne partent pas de l’origine).
en fonction de la période avec droite affine moyenne (attention, les axes ne sont pas orthonormés et ne partent pas de l’origine).
Les relatives faibles différences montrent donc bien que la période est proportionnelle au rapport ![]() .
.
Dans la formule de la période, l’amplitude n’apparait pas. Toutefois comme dit précédemment, cette formule n’est valable que pour de petites oscillations. Faisons maintenant varier l’amplitude et mesurons cette période ![]() .
.
| Angle (°) | Période (s) |
|---|---|
| 10 | 1.2 s |
| 20 | 1.31 s |
| 30 | 1.34 s |
| 40 | 1.40 s |
| 50 | 1.42 s |
| 60 | 1.44 s |
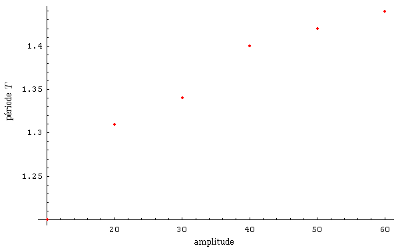 en fonction de l’amplitude
en fonction de l’amplitude du lâcher (les axes ne sont pas orthonormés et ne partent pas de l’origine).
en fonction de l’amplitude
en fonction de l’amplitude du lâcher (les axes ne sont pas orthonormés et ne partent pas de l’origine).
Nous voyons alors clairement que plus l’angle avec lequel nous lâchons le pendule est grand, plus la période augmente. La formule ![]() n’est donc plus valable lorsque cet angle devient trop grand.
n’est donc plus valable lorsque cet angle devient trop grand.
4. Questions
a. Vérifiez que l’équation différentielle de l’oscillateur harmonique admet comme solution la fonction ![]() .
.
Avec la relation fondamentale de la dynamique qui veut que ![]() et la formule de la force de rappel d’un ressort
et la formule de la force de rappel d’un ressort ![]() , nous pouvons poser l’équation différentielle comme
, nous pouvons poser l’équation différentielle comme ![]() et donc
et donc
![]()
Remplaçons ensuite ![]() qui est la dérivée seconde de l’équation horaire
qui est la dérivée seconde de l’équation horaire ![]() soit :
soit :
![]()
Postulons ensuite que ![]() et donc que
et donc que ![]() il nous reste donc en éliminant également les signes négatifs des 2 termes que
il nous reste donc en éliminant également les signes négatifs des 2 termes que
![]()
b. Donnez une interprétation physique des grandeurs ![]() ,
, ![]() et
et ![]() .
.
Dans l’oscillateur harmonique ![]() est l’amplitude de celui-ci, ce qui peut être traduit par l’écart maximum par rapport à la position d’équilibre de l’oscillateur au repos, ou encore par le rayon du cercle d’un mouvement circulaire uniforme correspondant à cet oscillateur.
est l’amplitude de celui-ci, ce qui peut être traduit par l’écart maximum par rapport à la position d’équilibre de l’oscillateur au repos, ou encore par le rayon du cercle d’un mouvement circulaire uniforme correspondant à cet oscillateur.
![]() est, rapporté à un MCU de rayon
est, rapporté à un MCU de rayon ![]() et de période
et de période ![]() , la vitesse angulaire du mobile.
, la vitesse angulaire du mobile.
![]() correspond à la position initiale de notre oscillateur, dont la valeur est l’angle en radians que fait le mobile avec le centre d’un cercle de rayon
correspond à la position initiale de notre oscillateur, dont la valeur est l’angle en radians que fait le mobile avec le centre d’un cercle de rayon ![]() correspondant à notre oscillateur.
correspondant à notre oscillateur.
c. Établissez à partir de l’équation du mouvement de l’oscillateur harmonique, l’expression donnant la période ![]() d’oscillation.
d’oscillation.
Reprenons l’équation différentielle ![]()
Remplaçons cette fois-ci ![]() par l’équation horaire de l’oscillateur harmonique et
par l’équation horaire de l’oscillateur harmonique et ![]() par l’équation de l’accélération de l’oscillateur harmonique ce qui nous donne :
par l’équation de l’accélération de l’oscillateur harmonique ce qui nous donne :
![]()
Après simplification, nous obtenons que ![]() et donc
et donc ![]() .
.
Sachant que ![]() , nous obtenons finalement en substituant
, nous obtenons finalement en substituant ![]() que
que ![]() .
.
5. Conclusion
Ce laboratoire a mis en évidence les relations entre les différentes variables qui interviennent dans un oscillateur harmonique et un pendule. Nous avons également vu qu’en connaissant une de ces variables, il nous était ensuite possible de calculer les autres sans trop se tromper. Les équations relatives à la période ont été particulièrement mises à l’épreuve et ont donné des résultats satisfaisants, montrant ainsi leur validité.